
GKD800-R8G型GNSS接收机由基准测量站、差分移动站和事后差分解算软件组成,基准站和移动站设备可互换。其核心GNSS接收机采用三模组合定位模式,当接收机接收到的GPS卫星低于四颗无法正常定位或PDOP值过大时,接收机可自动切换到GPS/GLONASS组合定位或北斗二代定位,接收机的多模组合定位模式可提高接收机可靠性,并为系统的事后差分提供更多的原始测量数据,提高差分解算测量精度。
基准站和移动站中的GNSS接收机分别接收GPS、GLONASS和北斗二代卫星的测量数据,并保存在记录器中。在测量工作完成后,将记录器中保存的基准站和移动站原始测量数据下载到计算机中,用事后差分解算软件进行差分解算,得到移动站精准测量结果。
Ø 信号跟踪
GPS L1 L2 L5
GLONASS L1 L2
BD2 B1/B2/B3
冷启动 <50s
热启动 <15s
信号重捕获 <2s
Ø 定位精度
伪距精度: GPS:L1=10cm(1σ)/L2=10cm(1σ)/L5=5cm(1σ)
BDS:B1=10cm(1σ)/B2=10cm(1σ)/B3=5cm(1σ)
GLONASS:L1=10cm(1σ)/L2=10cm(1σ)
载波精度: GPS:L1=0.5mm(1σ)/L2=1mm(1σ)/L5=0.5mm(1σ)
BDS:B1=0.5mm(1σ)/B2=0.5mm(1σ) /B3=0.5mm(1σ)
GLONASS:L1=1mm/L2=1mm/
单点定位精度:<1.5m
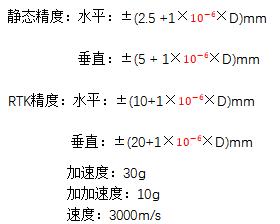
RTK初始化时间:<20s(基线长<20km内)
初始化可靠性:> 99.9%
Ø 环境参数
工作温度:-40℃— +80℃
存储温度:-55℃— +85℃
湿度:95%无冷凝
基准站和移动站体积小、重量轻、功耗小,
满足各种使用环境,便于携带和安装。

 产品系列
产品系列
 扫码关注
扫码关注